
Використання доплерівського ефекту дозволить розпізнавати рухомі об’єкти поза полем прямої видимості.
Для безпілотного автомобіля дуже важливо збирати і оцінювати як можна більшу кількість інформації про учасників дорожнього руху та перешкоди. З новим радаром, який в прямому сенсі слова здатний заглядати за кут, збір даних буде проходити ще ефективніше. Доповідь про розробку була представлена на конференції з комп’ютерного зору та розпізнавання образів.
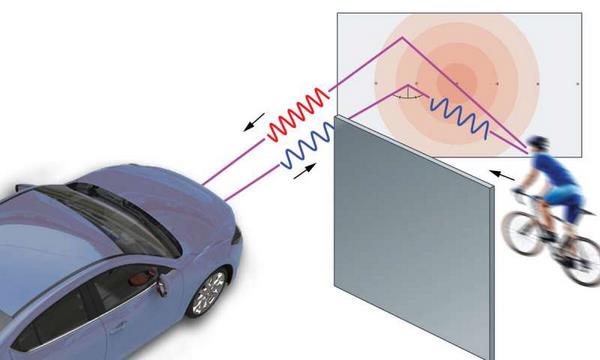
Нова система легко інтегрується практично в будь-які транспортні засоби. В її основі — доплерівський радар; як випливає з назви, його робота заснована на принципі Доплера, при якому частота повернутого від цілі сигналу залежить від його швидкості відносно джерела сигналу.
У розглянутому випадку, потрапляючи на об’єкт під певним кутом, сигнал радара відображається, як куля від борту більярдного столу, і може направлятися до інших об’єктів. Частина випромінювання повертається назад до первісного джерела — автомобіля, оснащеного системою детекції, і фіксується спеціальними датчиками.
Відео, яке демонструє розпізнавання велосипедиста поза прямої видимості / Heide, Scheiner et al., 2020
«Це дозволить [безпілотним] автомобілям бачити приховані об’єкти, які сучасні лідари і камери не можуть зафіксувати, і, наприклад, дасть можливість автономному транспорту оцінювати ситуацію на небезпечному перехресті, — говорить один з авторів розробки Фелікс Хайде, співробітник Прінстонського університету. — Радарні датчики також відносно дешеві, особливо у порівнянні з лідарами, і можуть бути пристосовані для масового виробництва». Такий підхід дозволить запобігати можливим зіткненням з пішоходами та велосипедистами до їх виявлення датчиками прямої видимості.
У більш ранніх дослідженнях Хайде і його колеги вже намагалися реалізувати таку систему, використовуючи лазери. Однак цей підхід виявився непрактичним: він був дуже енерговитратний, до того ж радіус дії лазерів був досить обмеженим. Доплерівський радар більш економічний, до того ж має набагато менші втрати сигналу на гладких поверхнях. Головною проблемою технології на сьогодні вважається відносно низький просторовий дозвіл радара. Але розробники впевнені, що це можна вирішити завдяки ефективним алгоритмам обробки сигналів.
Система визначення об’єктів, які перебувають поза полем прямої видимості, поки далека від комерційного впровадження. Але її творці впевнені, що вже незабаром вона буде впроваджена на безпілотному транспорті й дозволить помітно поліпшити безпеку дорожнього руху.
Натхнення: naked-science.ru