
Команда проекту Surface Avatar оголосила про успішні випробування дистанційного керування роботами з орбіти Землі.
Астронавт НАСА Френк Рубіо і дослідники Німецького аерокосмічного центру провели експеримент з дистанційного управління роботами з МКС. Кілька роботів працювали в напівавтономному режимі, астронавт коригував їх дії за потреби. Експеримент — частина проекту Surface Avatar, що розробляється для дистанційного керування роботами на Марсі і Місяці.
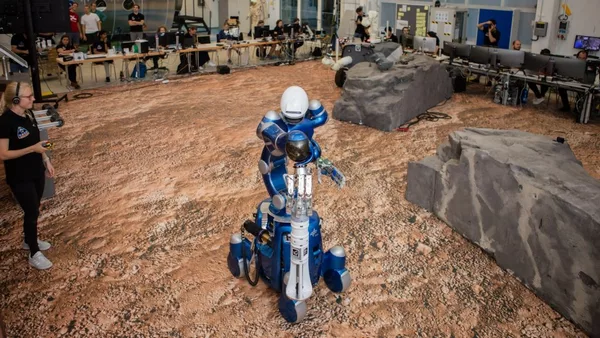
Команда з трьох роботів працювала в умовах штучного марсіанського ландшафту, відтвореного в Німецькому центрі космічних операцій. Виконуючи завдання тестового сценарію, роботи повинні були виконати підготовчі роботи перед прибуттям на Марс людей.
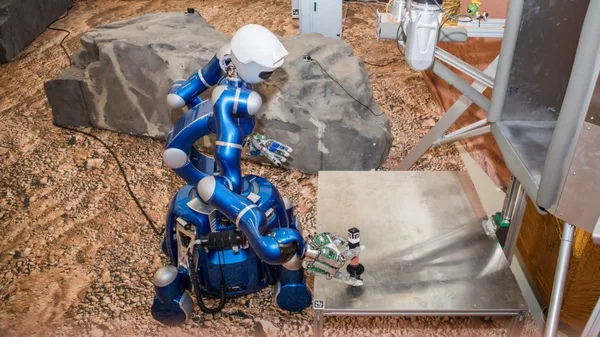
Дистанційно керований робот виконує завдання місії. Фото: DLR
Астронавт з МКС контролював і коригував дії роботів. У його розпорядженні був людиноподібний робот Rollin’ Justin, який розвантажив посадковий модуль і встановив сейсмічний датчик, а також Interact Rover для спостереження за місцевістю і робот LAMA, призначений для наукових досліджень.
Рубіо вперше протестував контролер для управління автономністю роботів. Цей пристрій дозволяє одним натисканням кнопки переводити пристрої в режим ручного управління як аватаром або змушувати його діяти самостійно. На екрані космонавта надходила інформація, яку бачив робот, а інтерактивний джойстик зі зворотним зв’язком дозволяв управляти роботом і «відчути» предмети в його руках. Всі завдання експерименту команда виконала за дві години.
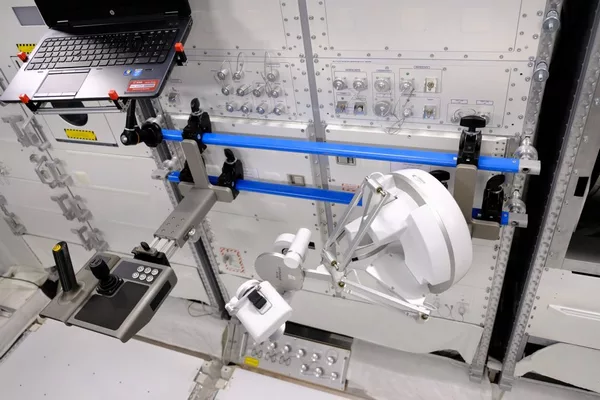

Інтерфейс управління роботами на МКС (зліва) і робочий екран (справа). Фото: DLR
Після успішної демонстрації дослідники проведуть детальну оцінку технології, а також підготують нові симуляції. Проект Surface Avatar передбачає як мінімум три експерименти з інтервалом приблизно в шість місяців. Вони будуть ставати все більш комплексними і складними.