
Інженери розробили маніпулятор, який імітує м’які хоботи слонів і щупальця восьминогів.
Інженери з Федеральної технічної школи Лозанни (EPFL) у Швейцарії і нідерландського Делфтського технологічного університету (TU Delft) розробили прототип роботизованого маніпулятора для безпечної взаємодії з людьми і делікатного управління предметами. Пристрій імітує м’які дотики хоботів слонів і гнучкі щупальці восьминогів.
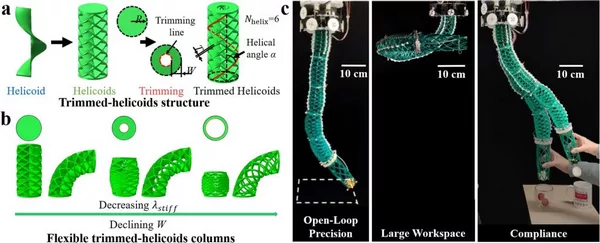
Будова гелікоїдів і принцип роботи маніпулятора. Зображення: Qinghua Guan et al., Npj Robotics
В основі розробки нова архітектура роботизованої руки. Дослідники модифікували пружинну спіраль, яку вони назвали «гелікоїдом», обрізавши її частини, щоб надати їй різноманітні функціональні можливості. Ця, здавалося б, проста дія дозволила їм точно контролювати, наскільки гнучкою або жорсткою стає спіраль в різних напрямках.
Регулюючи форму «гелікоїда», дослідники можуть зробити внутрішню частину стійкою до здавлювання, а зовнішню — досить гнучкою, щоб її можна було легко згинати. Завдяки цьому спеціальному дизайну вони створили м’якого робота, який може рухатися і діяти небаченими раніше способами. Вона демонструє спритність і м’якість дотиків, властиві природі. При цьому структура руки досить міцна, щоб захистити її приводи і іншу внутрішню електроніку від ударів.
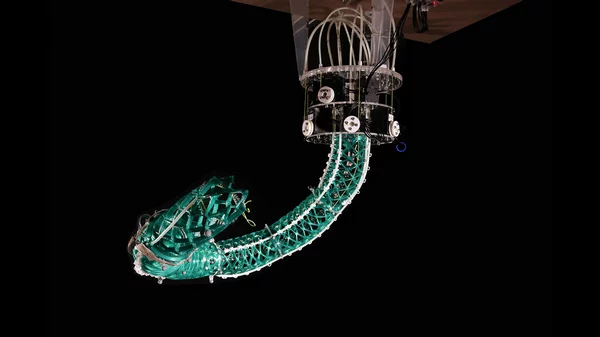
Демонстрація роботи роботизованою руки. Відео: Qinghua Guan et al., Npj Robotics
Демонстрація роботи роботизованою руки. Відео: Qinghua Guan et al., Npj Robotics
Пристрій також набагато більш гнучкіший, ніж традиційні роботизовані руки, які згинаються тільки в плечових, ліктьових і зап’ястних суглобах. Розробники вважають, що рука ідеально підходить для таких завдань, як збір фруктів і інші сільськогосподарські роботи, догляд за людьми похилого віку або робота на конвеєрі.