
В MIT створили систему дотику для м’яких роботів: вони можуть збирати навіть чіпси. Це стало можливим за допомогою нових латексних «бульбашок» і систем пропріоцепції. Про результати розробок можна прочитати на сайті вузу.

Головна проблема у створенні м’яких роботів полягає в тому, що вони повинні розуміти, що саме вони захоплюють і скільки сил повинні для цього використовувати. Одна з команд розробників розв’язала цю проблему, ґрунтуючись на попередніх дослідженнях Массачусетського технологічного інституту і Гарвардського університету, в яких дослідники розробили м’яке, конусоподібне роботизоване захоплення, яке стискається навіть на таких об’єктах, як Венерина мухоловка, і може піднімати предмети в 100 разів більше своєї ваги. Розробники вдосконалили це «чарівне кулькове захоплення», додавши датчики, які дозволяють йому підбирати предмети, настільки тонкі, як картопляні чіпси, і класифікувати їх, щоб захоплювач міг їх розпізнавати в майбутньому.
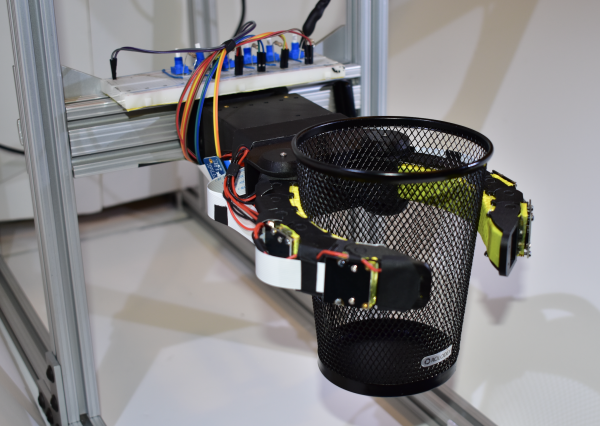
Команда також додала тактильні датчики, виготовлені з латексних «бульбашок», підключених до датчиків тиску. Алгоритм використовує зворотний зв’язок, щоб дозволити захоплювачу визначити, яке зусилля використовувати. Поки що команда перевірила датчики-захвати на предметах: починаючи від важких пляшок і закінчуючи банками, яблуками, зубною щіткою і мішком печива.
Друга група дослідників з Массачусетського технологічного інституту створила м’який роботизований палець під назвою GelFlex, який використовує вбудовані камери і глибоке навчання для створення тактильних відчуттів і пропріоцепції. Захоплення схоже на те, як людина тримає чашку двома пальцями. Кожен палець має одну камеру поряд з кінчиком пальця, а іншу — посередині. Камери спостерігають за станом передньої і бічної поверхні пальця, а нейронна мережа використовує інформацію з камер для зворотного зв’язку. Це дозволяє захоплювачу підбирати предмети різної форми.
Натхнення: hightech.fm