
Корейські інженери розробили новий тип дрона Palletrone, що дозволяє керувати ним шляхом фізичного впливу, як звичайним магазинним візком, забезпечуючи ефективне переміщення вантажів у складних умовах.
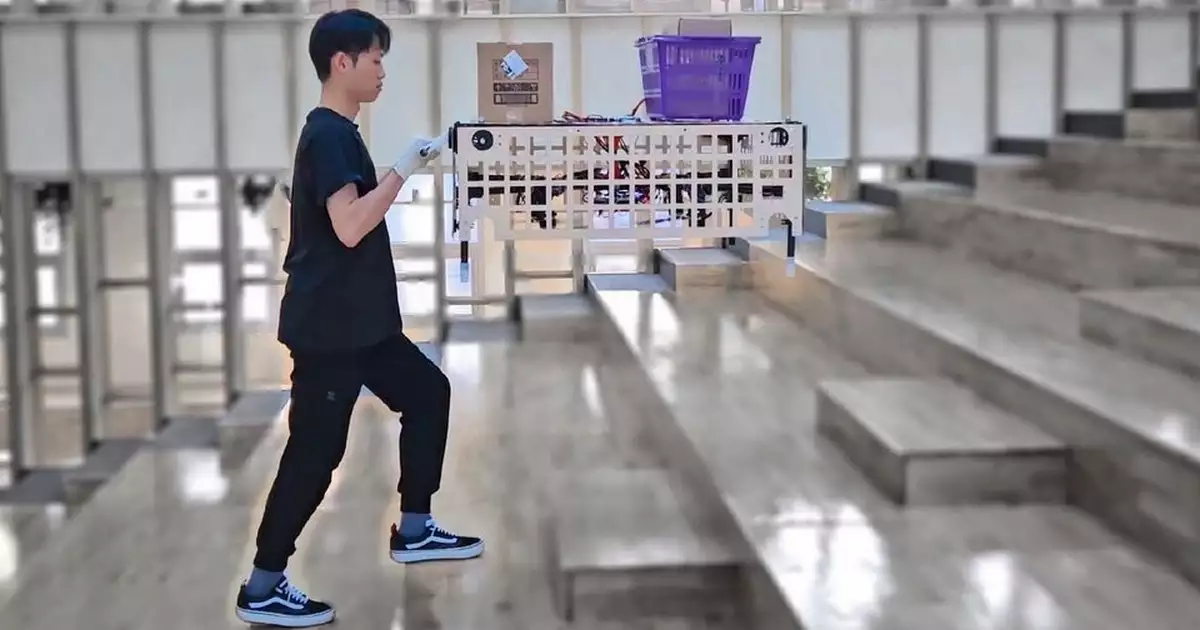
Дрон Palletrone, створений дослідниками з Сеульського національного університету науки і технології, поєднує в собі платформу для перевезення вантажів із системою квадрокоптера. Головна особливість цього дрона полягає в тому, що для його переміщення не потрібно складних програм або дистанційних пультів керування — оператор керує ним через ручку, прикріплену до платформи. Зусилля людини — штовхання, тягнення або підйом — перетворюються на відповідний рух дрона у трьох просторових вимірах.
Основна перевага Palletrone полягає в його здатності долати внутрішні перешкоди, такі як сходи, нерівності підлоги чи вузькі проходи. Завдяки чотирьом пропелерам, які керуються сервоприводами, дрон підтримує стабільність у повітрі, регулюючи орієнтацію без нахилів, що робить його надійним для перевезення вантажів. Зовнішній ґратчастий корпус захищає пропелери від зіткнень з об’єктами, забезпечуючи безпечне транспортування навіть у тісних приміщеннях.
Керування Palletrone здійснюється за допомогою двох основних алгоритмів: “відстеження збурень” та “адмітанс-контролю”. Перший компенсує випадкові зовнішні збурення, як-от вітер або інші чинники, що можуть вплинути на рух дрона. Другий алгоритм відповідає за плавність керування, враховуючи силу, що прикладається оператором, і відповідно регулюючи траєкторію дрона. Важливою особливістю є “віртуальна інерція”, яка дозволяє дрону реагувати інтуїтивно: чим більше зусилля докладає оператор, тим швидше та далі рухається дрон.
Проведені випробування показали, що Palletrone може стабільно рухатися за довільним маршрутом, утримуючи вантаж вагою майже 3 кг, без втрати стабільності по крену та тангажу. Цей підхід до управління є особливо важливим для складських приміщень або будівель з перешкодами, де інші засоби транспортування, такі як колісні візки, можуть бути непридатними.
Це не перший випадок, коли інженери впроваджують фізичне управління дронами. Наприклад, у 2015 році швейцарські розробники представили квадрокоптер Fotokite Phi, яким керували через повідець, що давало змогу звичайним користувачам легко керувати дроном без потреби в пілотуванні. Однак Palletrone є першим рішенням, яке орієнтоване на вантажні операції.
Palletrone може стати революційним інструментом для промислової логістики, де необхідно переміщувати вантажі на короткі дистанції у складних умовах. Завдяки простоті управління та інтуїтивності дрон має всі шанси стати невід’ємною частиною складів, виробничих приміщень та інших середовищ із обмеженим простором.