
Вчені з Брістольського університету розробили “м’якого робота з інтелектуальним управлінням захопленням”, що імітує нейром’язову структуру восьминога.
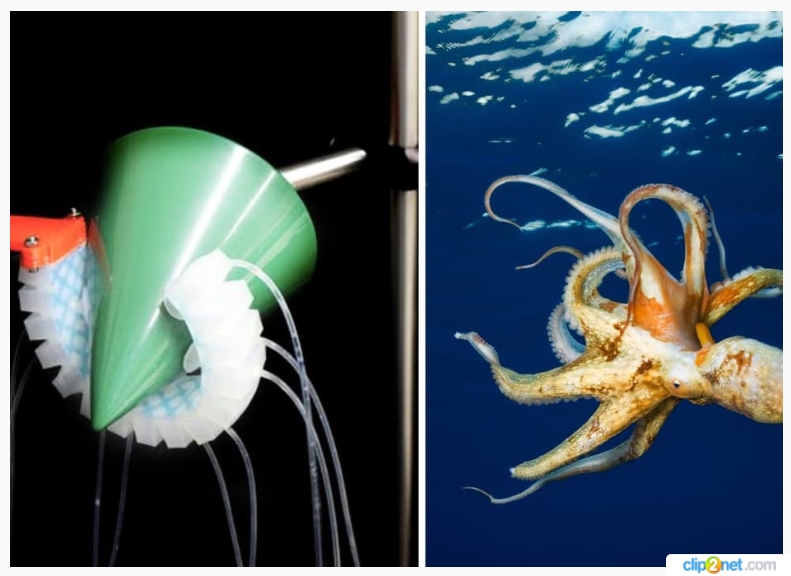
Його присоски не лише захоплюють об’єкти, а й “відчувають контакт, середовище та шорсткість поверхні”, що дозволяє адаптувати силу захоплення без центрального комп’ютера. “Ця робота продовжує дослідження присосок, здатних імітувати ключові аспекти восьминогової нервової системи”, — зазначив Тяньці Юе, головний автор дослідження.
Основою інновації стала ієрархічна інтелектуальна система, подібна до тієї, яку демонструє восьминіг, де “більшість обчислень виконується на локальному рівні”, а мозок лише координує вищі функції. Як наголошено в дослідженні, така структура дозволяє досягати мультимодального сенсорного сприйняття, включно з виявленням різних типів поверхонь і передбаченням сили взаємодії з об’єктом.
Пристрій має потенціал у широкому спектрі застосувань: від аграрного збирання делікатних плодів до медичних маніпуляцій усередині тіла. Дослідники підкреслюють, що технологія може зробити роботів “розумнішими, безпечнішими та енергоефективнішими”. Як підсумували автори: “Ми можемо імітувати ключові аспекти нервово-м’язової структури восьминога в м’яких робототехнічних системах”.
Це відкриває шлях до нової епохи автономної м’якої робототехніки, де інтелект закладено безпосередньо в сенсорні елементи.