
В останні роки інженери розробили багато систем, натхнених біологією людини і тварин. Точно відтворюючи складні біологічні процеси, вони зможуть надійно і ефективно вирішувати проблеми реального світу.
Нещодавно інженери розробили новий мікроелектромеханічний датчик, натхненний равликом, спіралевидною порожниною у внутрішньому вусі людини. Вона виробляє нервові імпульси у відповідь на звукові коливання. Штучний равлик, представлений в журналі Nature Electronics, обробляє звуки і виявляє окремі сигнали в галасливій обстановці більш ефективно, ніж прості мікрофони.
«Ідея дослідження полягала в тому, щоб створити штучні волоскові клітини, подібні волосковим клітинам у внутрішньому вусі, які відповідають за виявлення звуку в людському вусі», — розповіла Tech Xplore Клаудія Ленк, провідний автор статті.
Людське вухо і вуха інших ссавців працюють зовсім інакше, ніж звичайні мікрофони. Вони фіксують всі тони (тобто частоти) звукового сигналу одночасно. Гучні тони іноді маскують більш тихі. Вуха, з іншого боку, містять різні волоскові клітини, які відповідають за виявлення різних тонів (тобто звукових сигналів в різних частотних діапазонах).
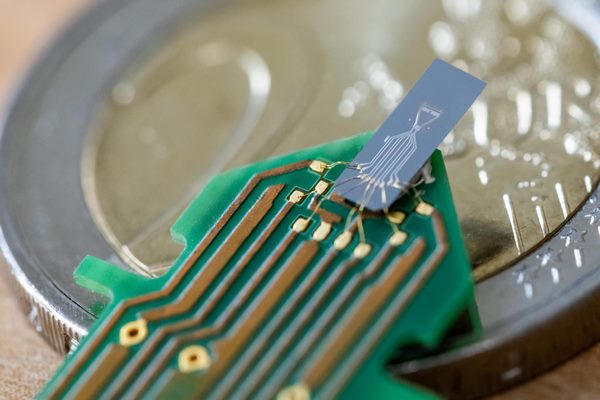
Новий мікроелектромеханічний равлик (МЕМС) складається з двох ключових компонентів. Перший включає серію невеликих кремнієвих кантилеверів, призначених для роботи в якості штучних волоскових клітин. Вони виявляють звукові сигнали з навколишнього середовища. Другий — це петля зворотного зв’язку, яка індивідуально налаштовує властивості виявлення кожного кантилевера.
Кантилевери коливаються при впливі звуку, і це коливання вимірюється вбудованою системою зчитування у вигляді електронного сигналу. Кожен кантилевер також містить привід. Якщо подавати напругу на привід, він змушує кантилевер згинатися або коливатися в залежності від прикладеного сигналу.
Оцінка біоінспірованого (розумного) датчика в порівнянні зі стандартним мікрофоном.
Надано: Технічний університет Ільменау / Майкл Райхель
Сигнал зворотного зв’язку, створюваний петлею зворотного зв’язку штучного равлика змінює спосіб виявлення звуку окремим кантилевером, наприклад, модулюючи його посилення, чутливість і ширину смуги. Роботу кантилевера можна налаштувати так, щоб воно було нелінійним. Це означає, воно буде змінюватися в залежності від амплітуди вловлювальних звуків — більше тихі звуки можна посилити, а більш гучні — заглушити.