
Європейське космічне агентство (ЄКА) повідомляє про розробку роботизованої руки довжиною 2,5 м для марсіанської місії. Вона здатна “бачити”, “відчувати” і приймати самостійні рішення.
Інженери розробляють роботизовану руку, яка забере з Марса зразки, зібрані марсоходом Perseverance. В ході місії з повернення марсіанського грунту на Землю Європейський роботизований маніпулятор довжиною 2,5 метра буде піднімати з Марса трубки, наповнені грунтом, і передавати їх на ракету для міжпланетної доставки.
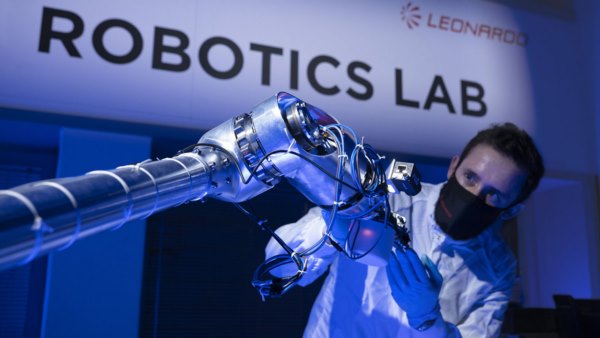
Архітектура маніпулятора імітує людську руку з плечем, ліктем і зап’ястям. Крім того, у робота є власний вбудований “мозок” і “очі”. ЄКА повідомляє, що маніпулятор може виконувати великий діапазон рухів з сімома ступенями свободи. Високий рівень спритності дозволить руці витягувати трубки з марсохода, піднімати їх з марсіанського грунту, вставляти в контейнер і закривати кришку перед стартом з Марса.
braccio robotico
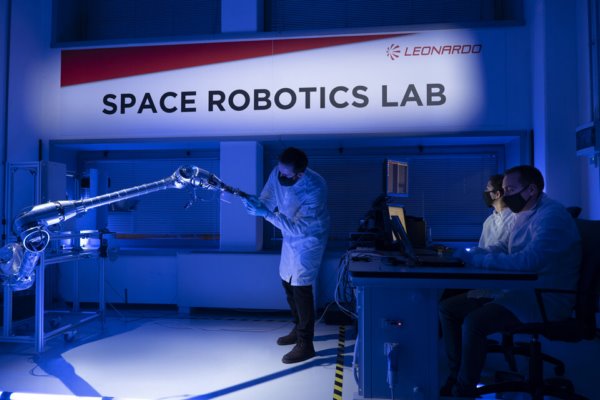
Робототехнічна рука для марсіанської місії. Фото: Leonardo/Maxon/GMV/ OHB Italia/ SAB Aerospace s.r.o
Робот буде обладнаний двома камерами і безліччю датчиків. За допомогою цих пристроїв він зможе самостійно визначити найкращий план дій і відповідним чином скоординувати рухи.
Робототехнічна рука є частиною місії Mars Sample Return. Вона складається з трьох частин і спрямована на те, щоб до 2033 року доставити на Землю зразки, зібрані на Червоній планеті.
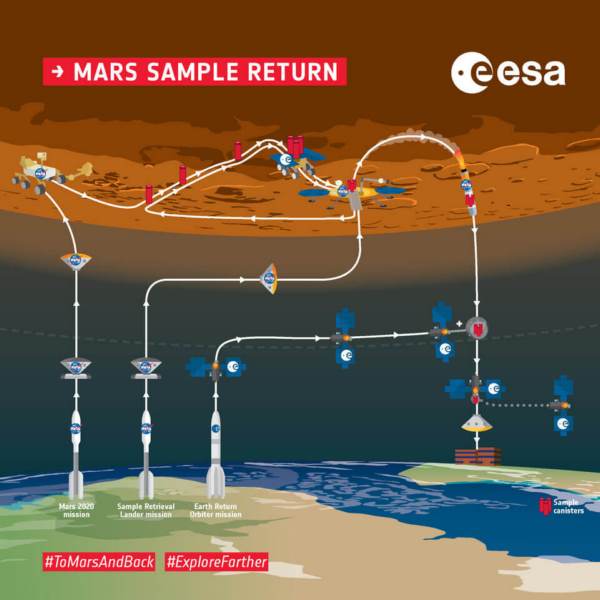
Схема місії Mars Sample Return. Зображення: EKA
Після того, як марсохід збере потрібні зразки, він повернеться на стартовий майданчик. За допомогою маніпулятора зібраний грунт буде занурений в контейнер і герметично упакований. Робот закриє кришку контейнера і марсіанські зразки будуть запущені на орбіту. Там їх підбере орбітальна станція ЄКА Earth Return Orbiter (ERO), яка і доставить матеріал назад на Землю.