
Вчені з Університету Манчестера використовували комбінацію математичних методів, комп’ютерного моделювання та лабораторних експериментів, щоб створити робота з оптимальними розмірами, формою і розташуванням частин механізму, що дозволяють йому стрибати екстремально високо, щоб долати перешкоди, які у багато разів перевищують його власний розмір. Результати їхньої роботи опубліковані в науковому журналі Mechanism and Machine Theory.
У підсумку британським інженерам вдалося створити модель робота розміром 15 сантиметрів і вагою 205,6 грама, здатного стрибати на висоту до 120 метрів. До цього світовий рекорд для роботів, що стрибають, становив 33 метри.
Широка сфера застосування таких роботів – від спостереження за небезпечними або важкодоступними просторами до дослідження планет у майбутньому – ґрунтується на їхній здатності долати перешкоди, недоступні для інших наземних механізмів, – наприклад, кам’яні брили, лісові буреломи або пересічений рельєф печер.
Британських дослідників підштовхнув до роботи аналіз функціональних проблем конструкції наявних моделей роботів-стрибунів: вони часто злітають до того, як повністю вивільнять запасеної енергії пружини, що призводить до неефективних стрибків та обмеження їхньої максимальної висоти. Також вони витрачають енергію даремно, переміщаючись з боку в бік або обертаючись замість того, щоб рухатися прямо вгору. Інженери з Манчестера поставили перед собою мету створити модель, яка усуне ці небажані переміщення при збереженні необхідної міцності та жорсткості конструкції.
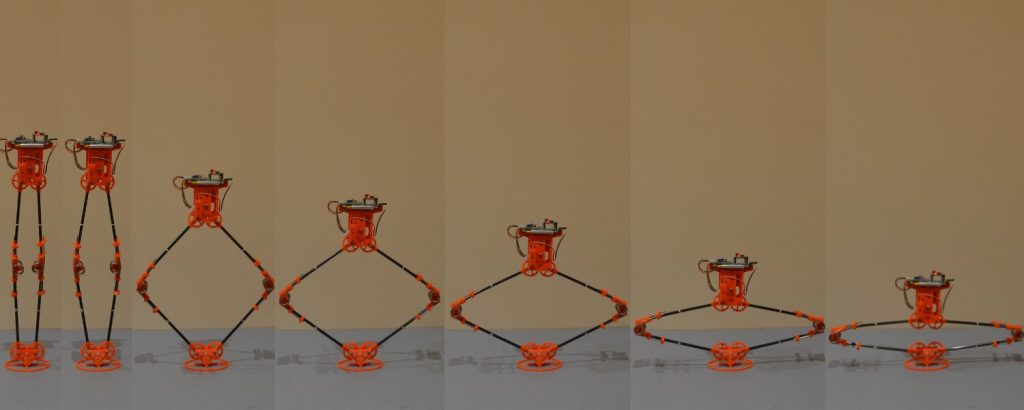
Рішення було знайдено у використанні легких ніжок у формі призми і застосуванні пружин, що розтягуються. І хоча дослідники знайшли практичний варіант конструкції, що дає змогу значно підвищити продуктивність стрибка, їхня наступна мета – контролювати напрямок стрибків і з’ясувати, як використовувати кінетичну енергію під час приземлення, щоб збільшити кількість стрибків, які робот може зробити за один раз.