
Інженери розробили роботів, що нагадують багатоніжок, які можуть рухатися по складній вибоїстій місцевості. Дослідження опубліковані в журналах Science і Proceedings of the National Academy of Sciences.
Дослідники з Технологічного інституту Джорджії розробили нову теорію пересування на кількох ногах і створили моделі багатоногих роботів. Випробування підтвердили, що пристрої з великою кількістю дублюючих ніг можуть пересуватися по нерівних поверхнях без додаткових датчиків або технологій управління.
Дослідники розробили концепцію, що описує пересування, засновану на теорії комунікації математика Клода Шеннона. Вони довели, що додавання пар ніг до робота збільшує його здатність надійно переміщатися по складних поверхонь — концепція, яку вони називають просторовою надмірністю.
Ця надмірність забезпечує успішне переміщення без необхідності використання датчиків для інтерпретації навколишнього середовища. Якщо одна нога спотикається, безліч інших ніг змушує пристрій рухатися, незважаючи ні на що. По суті, робот стає надійною системою для перевезення себе і навіть вантажу з пункту А в пункт Б по складним або «шумним» ландшафтам.
Переміщення багатоногих роботів. Відео: Baxi Chong et al., Science
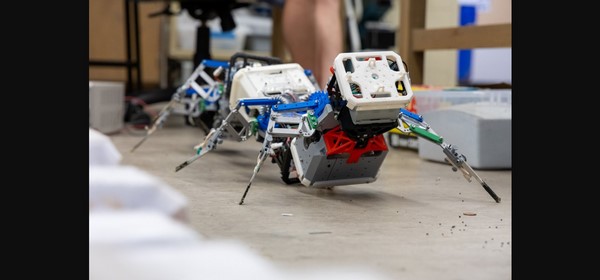
Керуючись цією концепцією, дослідники створили різних роботів, кожен раз збільшуючи кількість його ніг на дві: від шести до 16. У міру збільшення кількості ніг робот міг більш спритно переміщатися по місцевості навіть без датчиків, як і передбачала теорія.
Для роботи більшості класичних роботів потрібна велика кількість датчиків. Але при виконанні складних завдань, наприклад, рятувальних робот, дослідження Марса або мікроскопічних систем, сприймання робота часто обмежена. В таких умовах автономні роботи з безліччю ніг будуть більш успішними, вважають інженери.