
Інженери з Китаю розробили схожих на равликів роботів, які здатні об’єднуватися в рій. Кожен роборавлик оснащений гусеницями і може переміщатися пересіченою місцевістю, а при зустрічі з перепонами, які неможливо подолати поодинці, об’єднується з іншими роботами в різноманітні структури, наприклад, у міст, або більшого робота.
Кожен роборавлик має постійні магніти, вбудовані в гусениці, і вакуумну присоску, за допомогою яких вони можуть пересуватися і закріплюватися на раковинах один одного. Крім структур, що допомагають подолати складні перешкоди, роботи можуть зібратися в маніпулятор для взаємодії з навколишніми предметами. Стаття опублікована в журналі Nature Communication..
Об’єднання роботів у загін із безлічі одиниць, що діють як єдине ціле, часто дає змогу виконувати завдання, з якими роботи не впоралися б поодинці. Наприклад, рій дронів може обстежити істотно більшу територію під час пошуково-рятувальної операції, ніж один дрон. А флот підводних роботів може ефективно досліджувати і картографувати великі підводні області, такі як коралові рифи, або провести моніторинг стану водного середовища, зібравши великий обсяг даних за короткий час.
На сьогодні найбільш вивчені можливості практичного застосування повітряних і водних роїв роботів. Вони мають високу свободу переміщення в тривимірному просторі та з легкістю долають перешкоди, що зустрічаються на їхньому шляху. На відміну від них, більшість наявних наземних ройових наземних роботів були створені для роботи на плоскій поверхні в контрольованих лабораторних умовах. При цьому для ефективної роботи поза приміщеннями роботи, що складають рій, повинні вміти діяти в неструктурованому середовищі, рухатися різними типами поверхонь і долати перешкоди, що трапляються на шляху, поодинці та разом. В останньому випадку роботам може допомогти з’єднання в тривимірні структури.
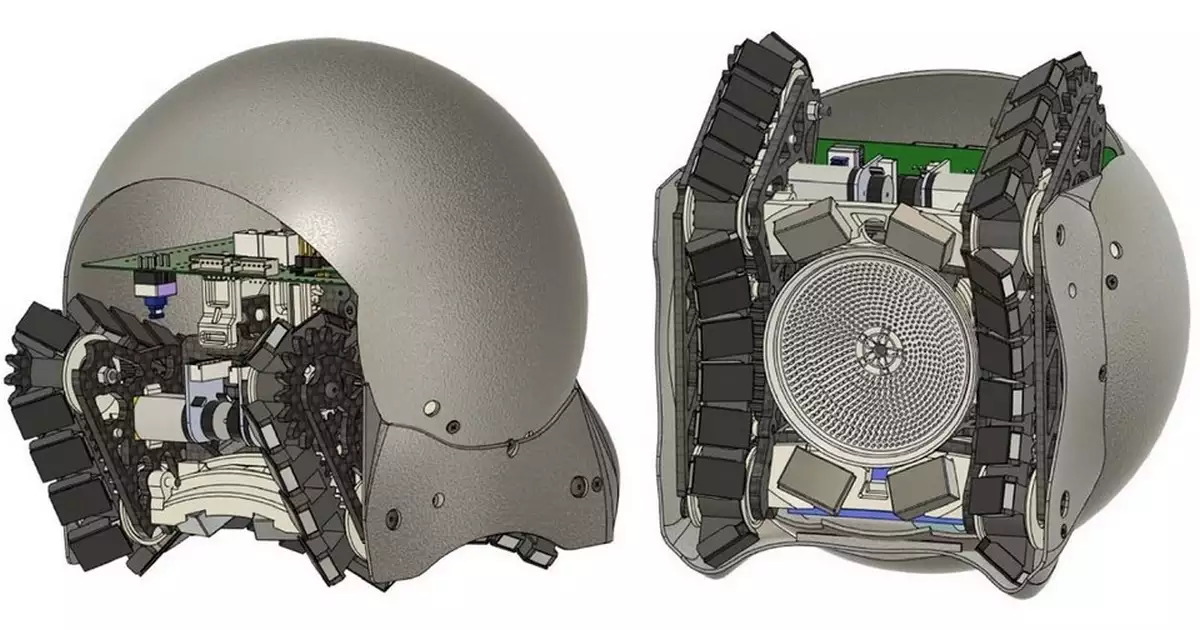
Прототип таких роботів створили інженери під керівництвом Тіня Лунь Лама (Tin Lun Lam) з Китайського університету Гонконгу в Шеньчжені, надихнувшись особливостями будови мушлями равликів і їхньою здатністю прикріплятися до поверхонь. Розроблений інженерами робот-равлик складається з двох основних частин: феромагнітної сферичної оболонки діаметрів 120 міліметрів і рухового механізму з двома режимами дії – вільним переміщенням і жорстким кріпленням.
Для переміщення у вільному режимі роборавлик використовує дві полімерні гусениці з вбудованими постійними магнітами. Вони дають змогу роботу вільно їздити по металевій сферичній оболонці раковини іншого роборавлика. У цьому режимі робот має три ступені свободи, проте міцність з’єднання між роботами порівняно невелика – зазвичай магнітні гусениці можуть утримати тільки одного робота на поверхні іншого.
У разі, якщо потрібне з’єднання з кількох роботів, робовулитка активує другий режим. У ньому використовується висувна вакуумна присоска, розташована в просторі між гусеницями. У такому вигляді рух робота стає обмеженим: він може тільки повертатися навколо вертикальної осі, використовуючи для цього механізм із черв’ячною передачею, розташований на присоску, а також свої гусениці. Експерименти показали, що сили утримання окремого робота вистачає, щоб сформувати горизонтальну консоль із трьох роботів.
Під час випробувань інженери продемонстрували здатність рою долати перешкоди, недоступні для одиночних роботів. Наприклад, шість роборавликів успішно подолали кам’яну сходинку заввишки в півтора раза більше висоти одного роборавлика. Для цього перші три роботи вишикувалися в ряд уздовж краю виступу, забезпечуючи поперечну стійкість конструкції. Потім до них приєднався четвертий робот – для поздовжньої стійкості конструкції. П’ятий робот забрався на основу, що утворилася, і притулився до сходинки. Нарешті, шостий робот заліз на основу, сформовану першими п’ятьма роботами, і заїхав по ній на вершину сходинки.
Під час іншого випробування рій роботів подолав ділянку, вимощену бруківкою, яка виявилася занадто важкопрохідною для одного робота. Для цього сім роборавликів зібралися в одного великого триногого робота, якому вдалося проїхати нерівною поверхнею. У третьому експерименті вісім роботів-равликів змогли побудувати міст через канаву завширшки близько 30 сантиметрів, по якому інші роботи переїхали на протилежний бік перешкоди. Нарешті, роботи здатні зібратися в конструкцію, що нагадує роборуку з клешнею. Такий маніпулятор, складений з окремих роборавликів, що діють колективно, здатний захоплювати і переміщати предмети.
Надалі розробники планують підвищити надійність механізму з’єднання роботів між собою, особливо щодо їхньої стійкості до впливу зовнішніх сил. Це дасть змогу розширити кількість типів роботів, у які може збиратися рій, особливо з огляду на різноманітність можливих з’єднань. Крім цього, планується створити більш досконалі алгоритми управління роєм, а також стратегії для автономного прийняття рішень.