
У ходячих роботів є одна загальна проблема – вони можуть легко посковзнутися на мокрій підлозі, застрягти у в’язкому бруді або пошкодити датчики на грубій землі. Словом, здатність визначати якість ландшафту, яким крокує машина, вкрай важлива для роботів, оскільки поломки, пов’язані з раптовим падінням, можуть коштувати дуже дорого.
Складність полягає в тому, що до тих пір, поки машина не ступить на саму поверхню, її фізичні властивості їм визначити досить важко. Інженери з Каліфорнійського університету в Берклі і Технологічного інституту в Цюріху придумали, можливо, найбільш ефективну стратегію ідентифікації ландшафту роботами і представили свої напрацювання на Міжнародній конференції з робототехніки та автоматизації.
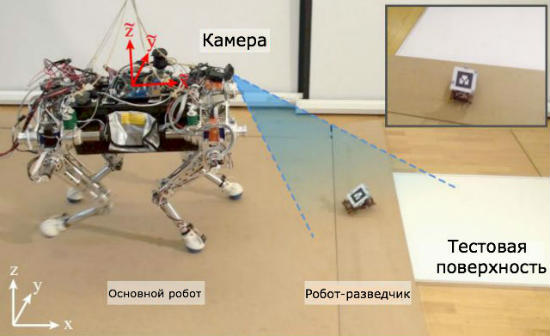
Вчені створили команду з двох роботів, одного побільше, а іншого поменше. Малий робот рухається попереду і використовує масив датчиків для визначення фізичних властивостей поверхні. Дані передаються великому роботу, який за допомогою бортового комп’ютера обробляє інформацію і приймає рішення про подальші дії.
Робот-розвідник може бути дешевим і в цілому не дуже функціональним, оскільки його єдина мета – це постачання великого робота елементарною інформацією і страхування великого брата від падіння і поломки. Інженери повідомляють, що одного великого робота можна оточити цілою армією дрібних розвідників, щоб система працювала без збоїв.
Для демонстрації можливостей технології інженери розділили обов’язки. Фахівці Каліфорнійського університету створили розвідника VelociRoACH, а команда з Цюріха розробила великого чотириногого бота StarlETH. Перший рухається попереду і досліджує місцевість, а другий стежить за допомогою камер за дрібним побратимом і виробляє подальшу стратегію руху.
Разом роботи здатні класифікувати поверхню як “неслизьку та безпечну” або “слизьку і небезпечну” з точністю понад 90%. З ще більшою точністю робот StarlETH може визначити місце розташування VelociRoACH, щоб зрозуміти в якому напрямку йому потрібно або не потрібно рухатися.
“Робот VelociRoACH не тільки дешевий, але і досить міцний. Йому не страшні слизькі поверхні. Під час випробувань він послизнувся і впав, ми його підняли, і він продовжив роботу без яких-небудь збоїв”, – розповідає провідний автор дослідження Дункан Хэлдейн (Duncan Haldane) з Каліфорнійського університету.
Особливість системи полягає в тому, що робот-розвідник VelociRoACH все ж може застрягти на липкій місцевості і, відповідно, вийти з ладу. Тому, пояснюють інженери, дрібних роботів варто робити максимально бюджетними (VelociRoACH, наприклад, зроблений в основному з картону) і сприймати їх як витратний матеріал.
Оптимальна система розпізнання ландшафту – це кілька роботів-розвідників, оточуючих одну велику машину. В майбутньому Хэлдейн і його колеги планують створити цілу армію дешевих мікроботів для підвищення ефективності технології.