
Крихітний робот, керований світлом і магнітним полем, може переміщатися по будь-якій похилій поверхні, в тому числі «вниз головою». Розробка описана в журналі Cell Reports Physical Science.

Інженери з Університету Ватерлоо розробили гнучкого робота GeiwBot, здатного переміщатися по похилих і перевернутих поверхнях без підключення до зовнішнього джерела живлення. В основі розробки – аналіз “захоплень”, які гекони — невеликі ящірки — використовують для руху.
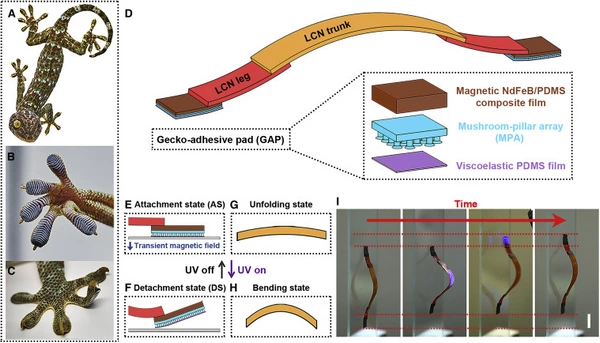
Будова лапи гекона і робота GeiwBot. Зображення: Jian Sun et al., Cell Reports Physical Science
GeiwBot – невеликий пристрій довжиною близько 4 см, шириною 3 мм і товщиною 1 мм. Він створений з рідкокристалічних еластомерів і синтетичних клейких прокладок. Світлочутлива полімерна смужка імітує вигинання і розтягнення землемірки під час руху, а магнітні подушечки — особливості кінцівок геконів, що забезпечують захоплення і зчеплення з поверхнею.
Переміщення GeiwBot по перевернутій поверхні (стелі). Відео: Jian Sun et al., Cell Reports Physical Science
Для управління рухом робота дослідники використовували дистанційний вплив за допомогою ультрафіолетового випромінювання і магнітного поля. Комбінований вплив призводить до настроюваної деформації тіла робота і дозволяє управляти його переміщеннями.
Дослідники відзначають, що це перший м’який роботизований пристрій, який може успішно переміщатися по перевернутих поверхнях без підключення до пристроїв живлення. Дистанційне керування дозволяє в перспективі використовувати такі пристрої для проведення хірургічних операцій або рятувальних робіт в небезпечних або важкодоступних місцях.
Переміщення GeiwBot по вертикальній поверхні (стіні). Відео: Jian Sun et al., Cell Reports Physical Science
Інженери планують вдосконалити GeiwBot, щоб керувати пристроєм за допомогою ближнього інфрачервоного, а не ультрафіолетового світла і забезпечувати руху без зовнішнього магнітного поля. Це підвищить біосумісність пристрою для використання в хірургії.